ロボット 関節 構造

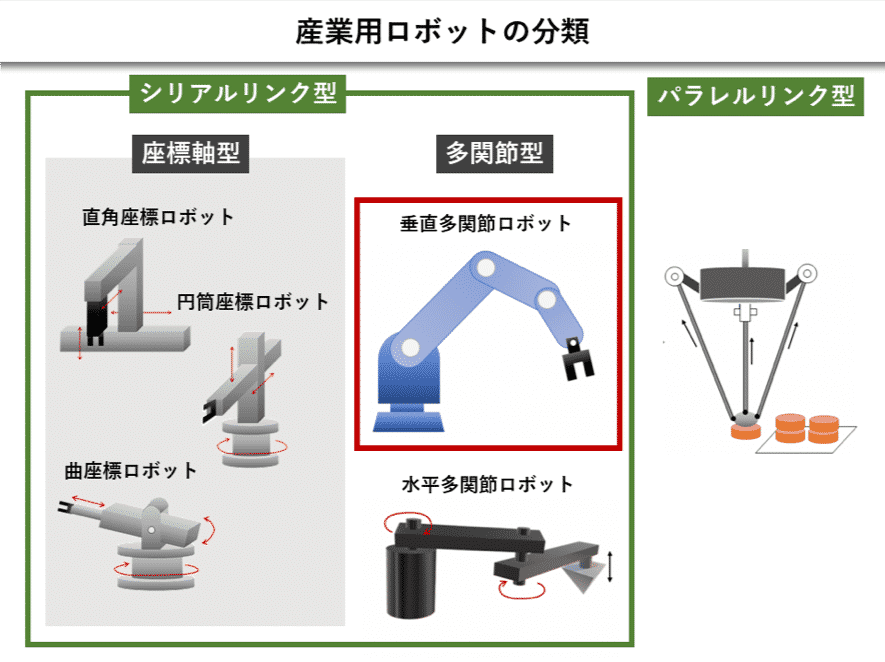
産業用ロボットにはどんな種類がある 主な6タイプの特徴を解説 Xyz 川崎重工業株式会社
ロボットの種類 構造って やさしいwebセミナー
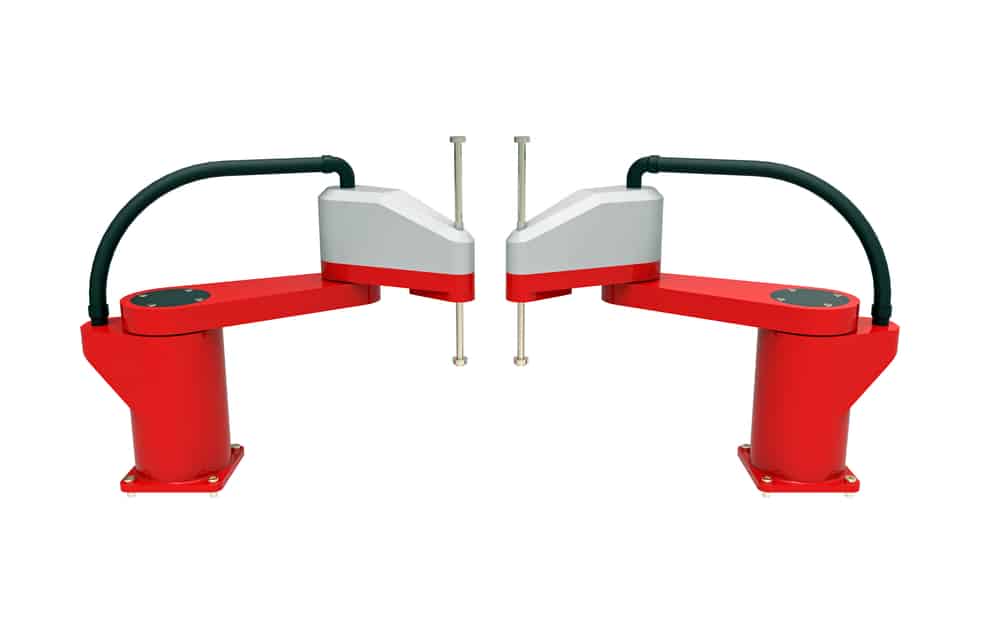
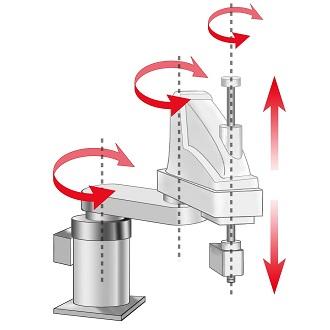
スカラロボットとは 構造や用途 おすすめスカラロボットメーカ5選 ロボットsierの日本サポートシステム

17 号 ロボットアームの関節構造 ロボット装置の測定方法 およびロボット装置の制御方法 Astamuse
Q Tbn And9gcr56gr Co 6ufxxb Cifscn84hisohd5qe7mlze2qmswjpicqai Usqp Cau
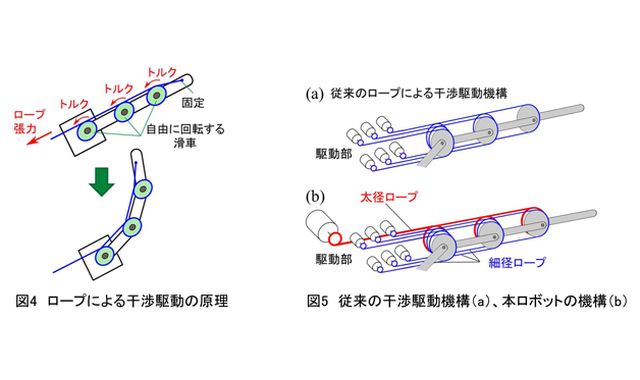
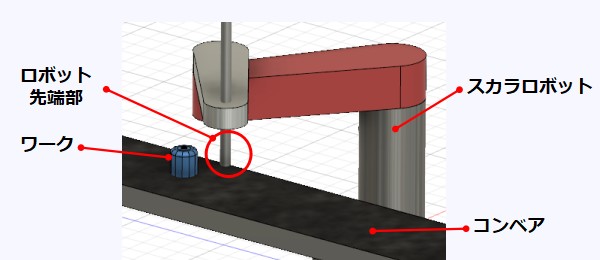
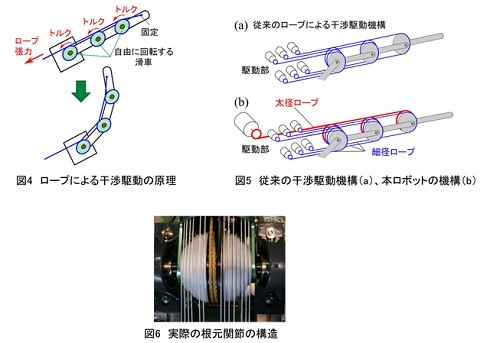
世界最長10mの超長尺多関節ロボットアームで水平方向10kg保持を達成 高強度化学繊維ロープによる新たな多関節駆動機構を開発 Nedoと東工大 Fabcross For エンジニア
ロボット関節のモデル化 教科書61節 モモ タ入力軸での運動方程式ータ入力軸での運動方程式 τ a θa mm mm m a J θθτ =−D τn Jaa aa mθθτ D = n アーム出力軸での運動方程式.

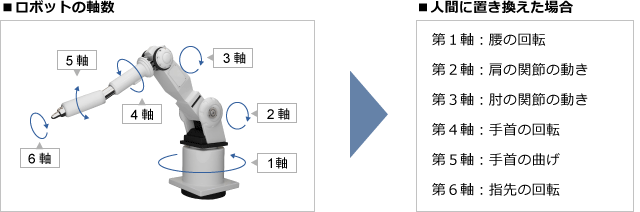
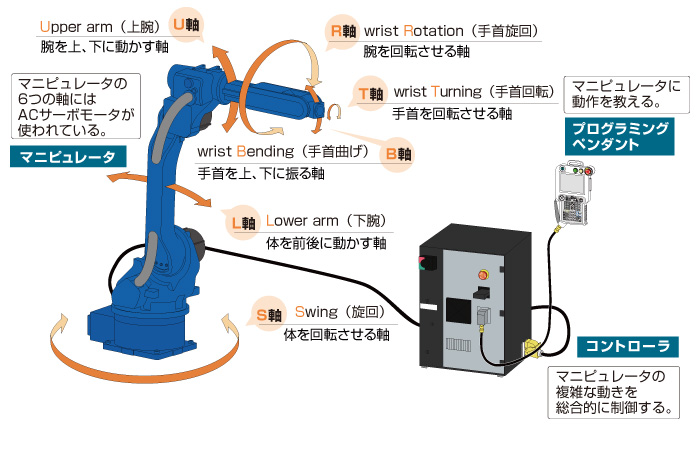
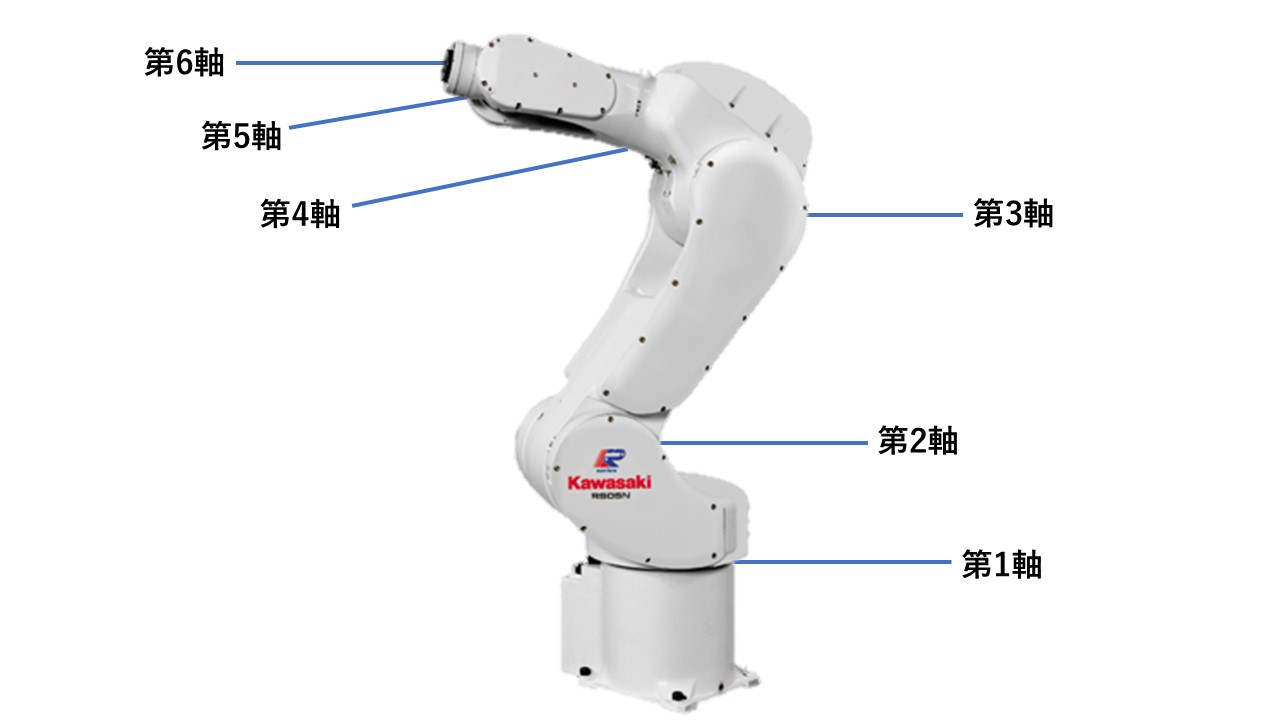
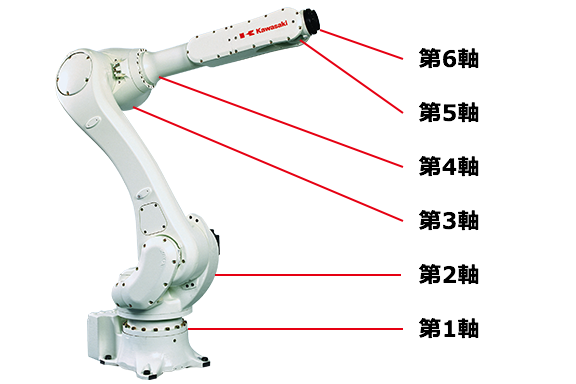
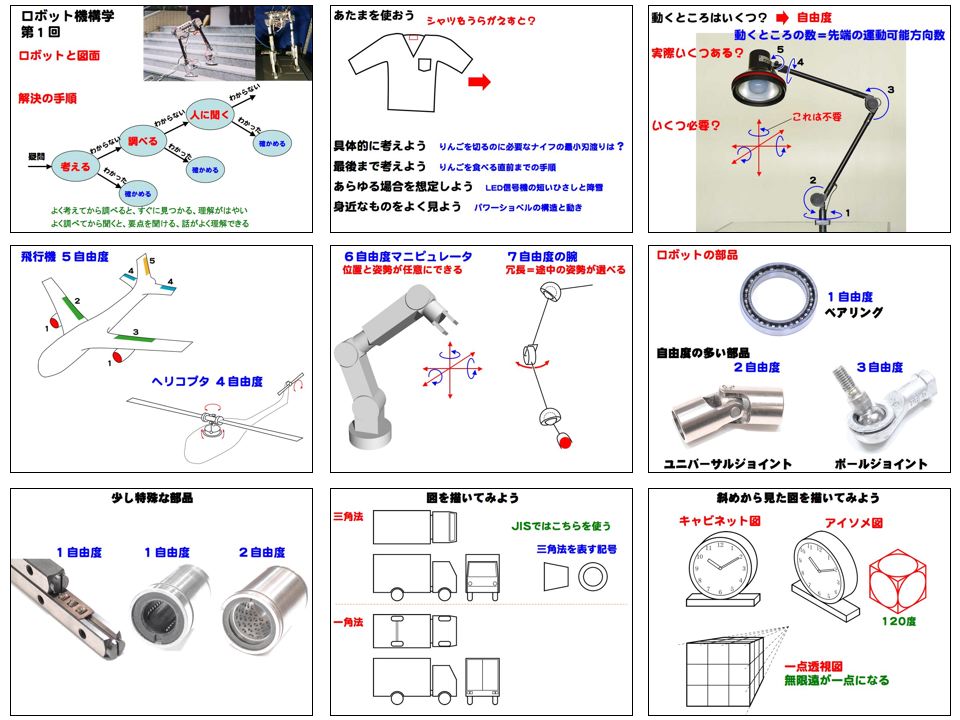
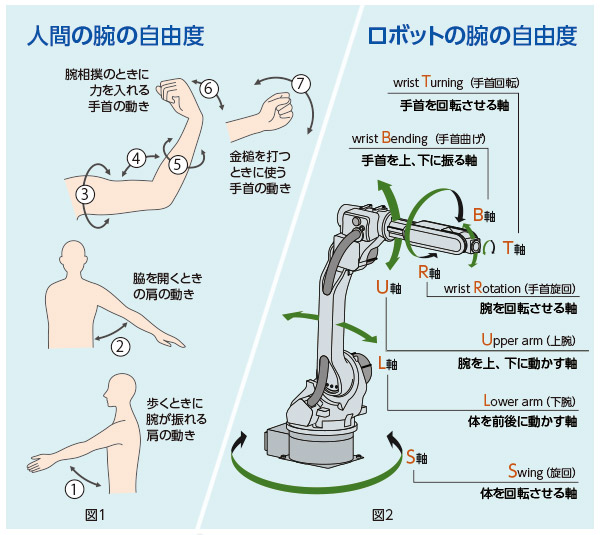
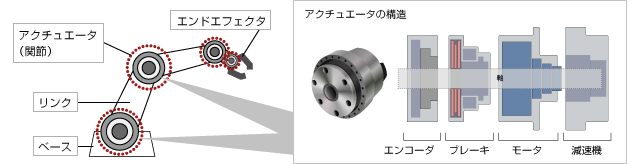
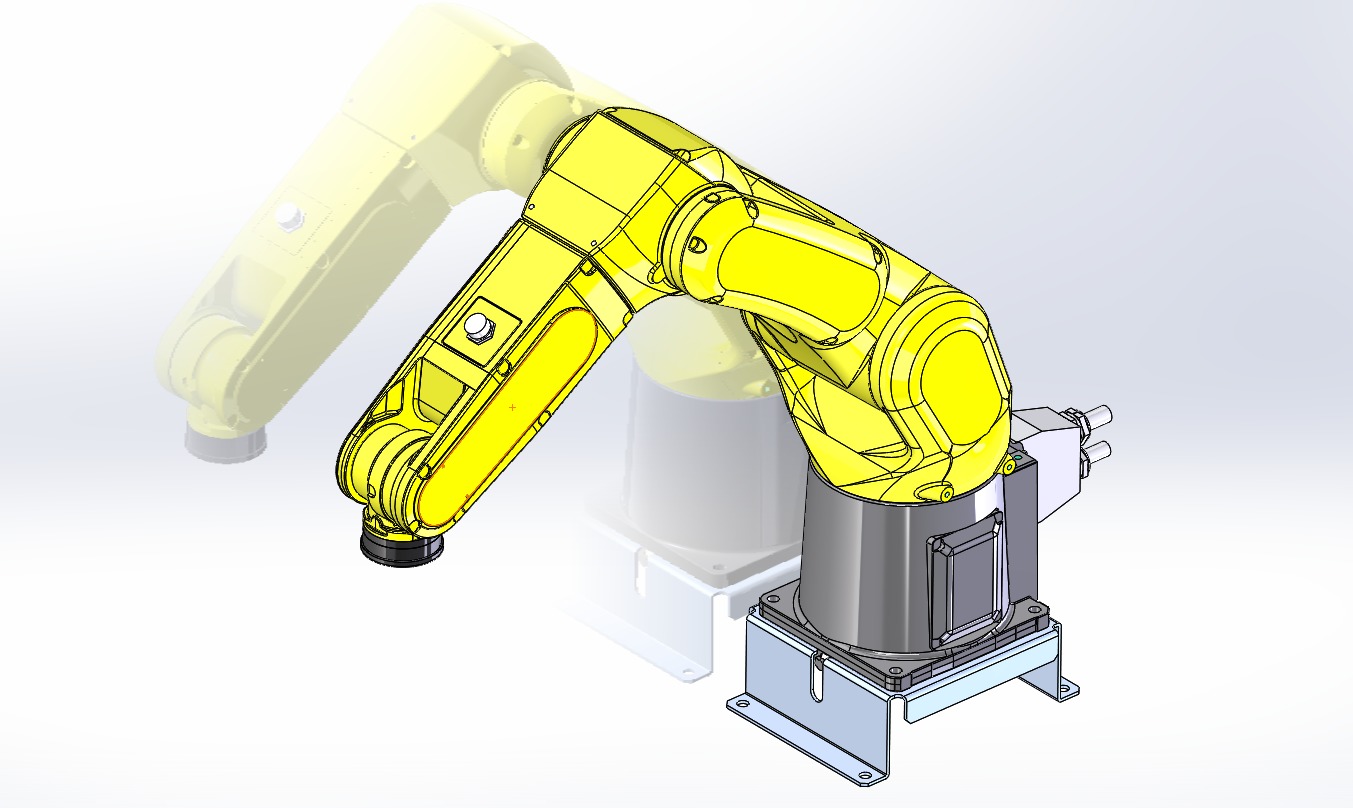
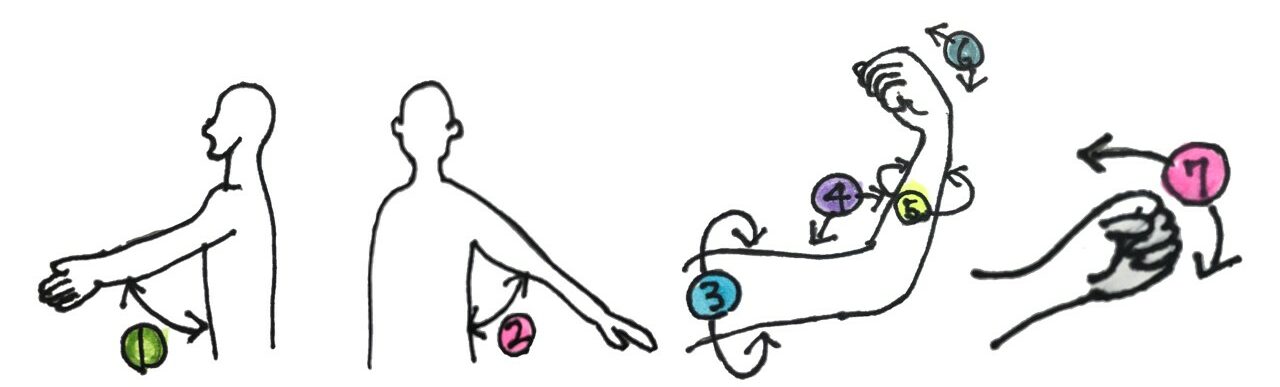
ロボット 関節 構造. ロボットを製作し,動かすためには以下のような知識が必要となる 具体的に計測するものは,ロボットの位置,速度,加速度や,各関節 構造 が単純なため. 一般的には6つの関節(6軸)で構成されています。 ロボットと人間の動きを比べたのが以下の図です。 この動きは、第1軸~第3軸が腰と腕、第4軸~第6軸が手首から先、というイメージです。 最初の3軸が特定の場所に手首を運びます。 そして次の3軸は、手首を自由な向きに動かしています。 この6軸構成が、人間のような自在な動きを可能としているわけです. 図4手首3関節の構造 極座標型 円筒座標型 直交座標型 スカラ座 (x r, y r, z r) (x r, y r, z r) (x r, y r, z r) (x e, y e, z e φ e) z0 z0 z0 z0 d3 d3 d3 d4 d2 d2 d1 x x0 l1 l2 θ2 θ1 θ1 θ1 θ2 θ3 図5産業用ロボットの構造.
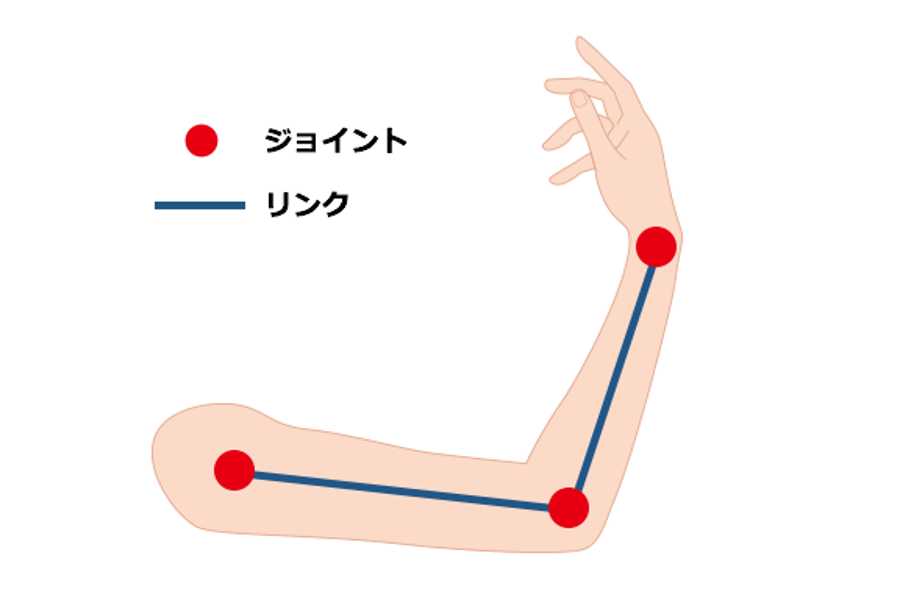
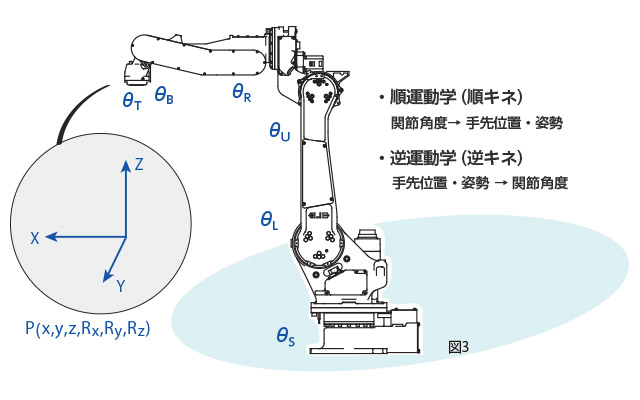
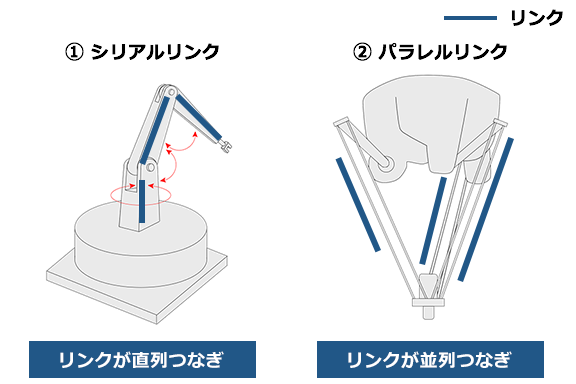
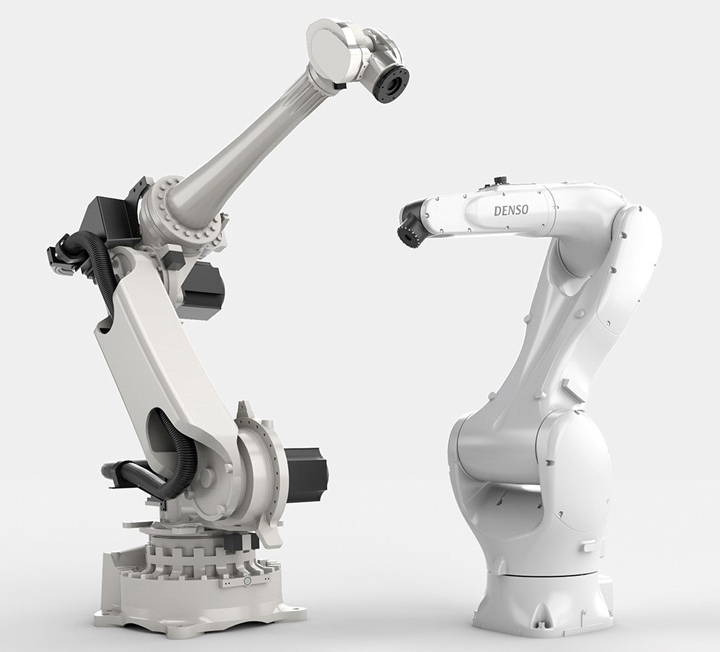
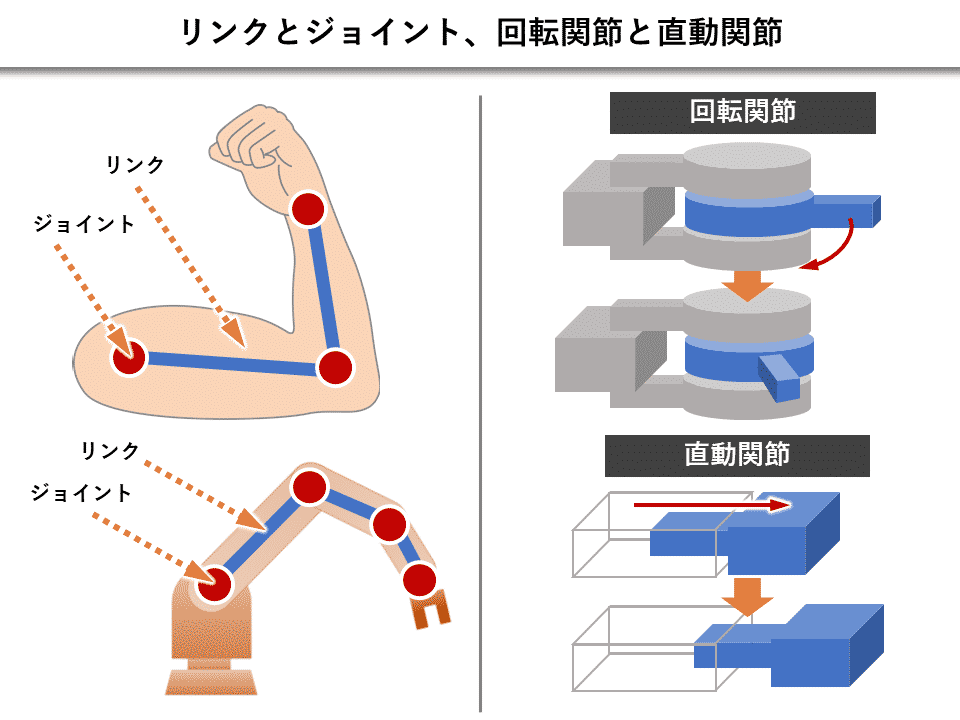
また、構造的な問題から垂直方向の動きが苦手で、汎用性の点では垂直多関節ロボットには及びません。 高精度で高速な「パラレルリンクロボット」 ⑴ 特徴 多関節ロボットは、関節を1つずつ動かしていく直列(シリアル)機構です。. 産業用ロボットはどんな構造︖ 産業用ロボットの構造は人間と同じ 橋本先生: 産業用ロボットはロボットアームで構成され、ジョイントとリンクの組み合わせが基本的な構造になるんだ。人間の体で言えば、肘や肩など自由に曲がる関節部分がジョイント、その間を繋ぐ骨の部分がリンクになるよ。. ロボットアームの順運動学問題 各関節角の値がリンク構造をなすロボットアームの所定の位置・姿勢に 与える影響を明らかにする 前提条件: ・アームの構造は開リンク構造とする ・各関節が1自由度を有し、回転関節または直動関節であるとする.
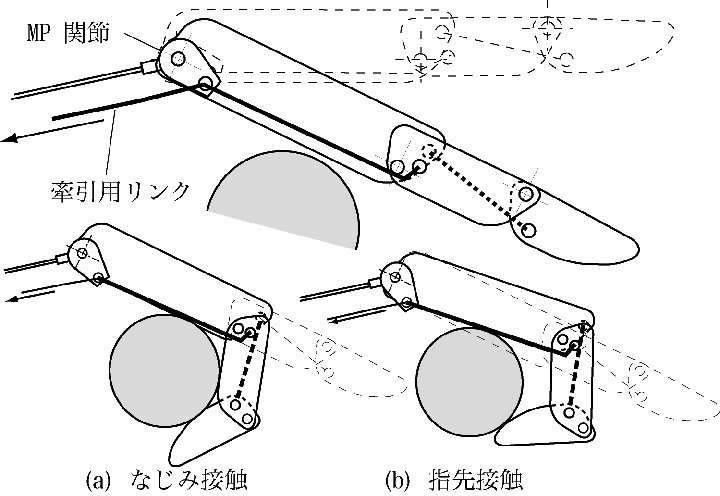
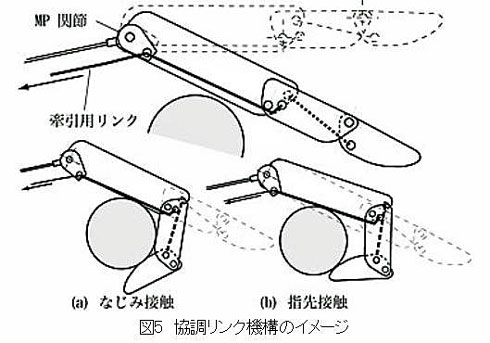
図4手首3関節の構造 極座標型 円筒座標型 直交座標型 スカラ座 (x r, y r, z r) (x r, y r, z r) (x r, y r, z r) (x e, y e, z e φ e) z0 z0 z0 z0 d3 d3 d3 d4 d2 d2 d1 x x0 l1 l2 θ2 θ1 θ1 θ1 θ2 θ3 図5産業用ロボットの構造. ロボットハンドの制御に関する研究Part II ロボット用アクチュエータ(駆動)機構の開発 (1)腱駆動,(2)空気圧人工筋,(3)丸ベルト捩り機構 アーム搭載型の全方向自律移動ロボットの開発 筋骨格を模した多関節ロボットフィンガと筋電制御. ロボットアームの順運動学問題 各関節角の値がリンク構造をなすロボットアームの所定の位置・姿勢に 与える影響を明らかにする 前提条件: ・アームの構造は開リンク構造とする ・各関節が1自由度を有し、回転関節または直動関節であるとする.
受動歩行ロボット2),Raibert3) や玄ら4) の跳躍走行ロ ボットは,適切に設計された身体構造が運動において制 御系と同様に重要であるという主張を実証していると考 えられる. 細田らは,各関節に空気圧人工筋を拮抗配置し,身体. ロボットを製作し,動かすためには以下のような知識が必要となる 具体的に計測するものは,ロボットの位置,速度,加速度や,各関節 構造 が単純なため. RCサーボの制動性能 首痙攣の治療法を検討するに当たって、先ずは首を動かしているMicro Servo 9g SG90の制動性能を確認します。 SG90に円盤を取付け、おもりを載せることで慣性モーメントを変化させ、SG90を設定した角度まで動かした際に円盤を停止させることができるかを観察します。.
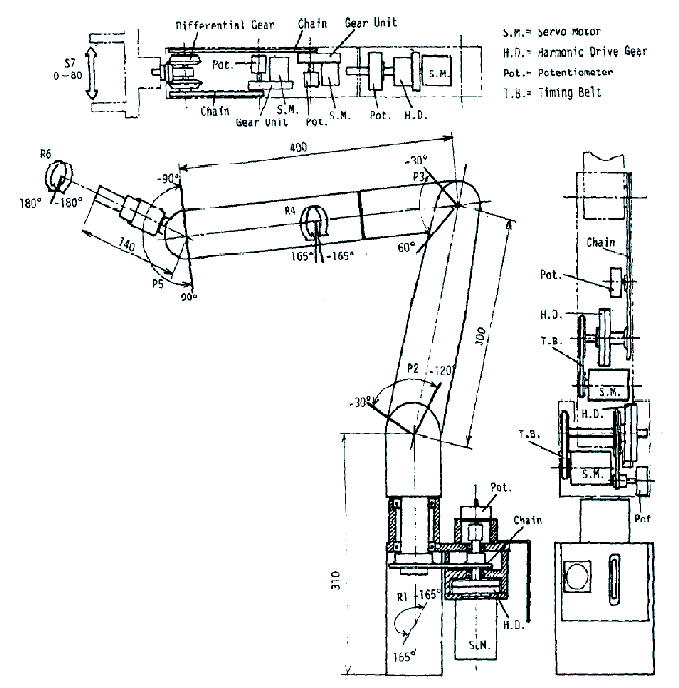
実際にロボットを制御するためには,計算した関節角度と実際のロボットの関節角度が 常に一致するように各モータを制御しなくてはならない.これを実現する制御システムを 一般に「サーボ」と呼ぶが,本実験で用いるサーボシステムをFig 5 に示す.. ロボットを製作し,動かすためには以下のような知識が必要となる 具体的に計測するものは,ロボットの位置,速度,加速度や,各関節 構造 が単純なため. 宿題:3自由度マニピュレータの構造をできるだけたくさん考える。関節角と先端位置の関係が求められるか考える。 第10回(07)腕型ロボットの機構と制御その2 配布資料 授業中の演習:(1)2関節マニピュレータの先端負荷から関節トルクを求める。.
図4手首3関節の構造 極座標型 円筒座標型 直交座標型 スカラ座 (x r, y r, z r) (x r, y r, z r) (x r, y r, z r) (x e, y e, z e φ e) z0 z0 z0 z0 d3 d3 d3 d4 d2 d2 d1 x x0 l1 l2 θ2 θ1 θ1 θ1 θ2 θ3 図5産業用ロボットの構造. ロボット関節のモデル化 教科書61節 モモ タ入力軸での運動方程式ータ入力軸での運動方程式 τ a θa mm mm m a J θθτ =−D τn Jaa aa mθθτ D = n アーム出力軸での運動方程式. ロボットアームの順運動学問題 各関節角の値がリンク構造をなすロボットアームの所定の位置・姿勢に 与える影響を明らかにする 前提条件: ・アームの構造は開リンク構造とする ・各関節が1自由度を有し、回転関節または直動関節であるとする.
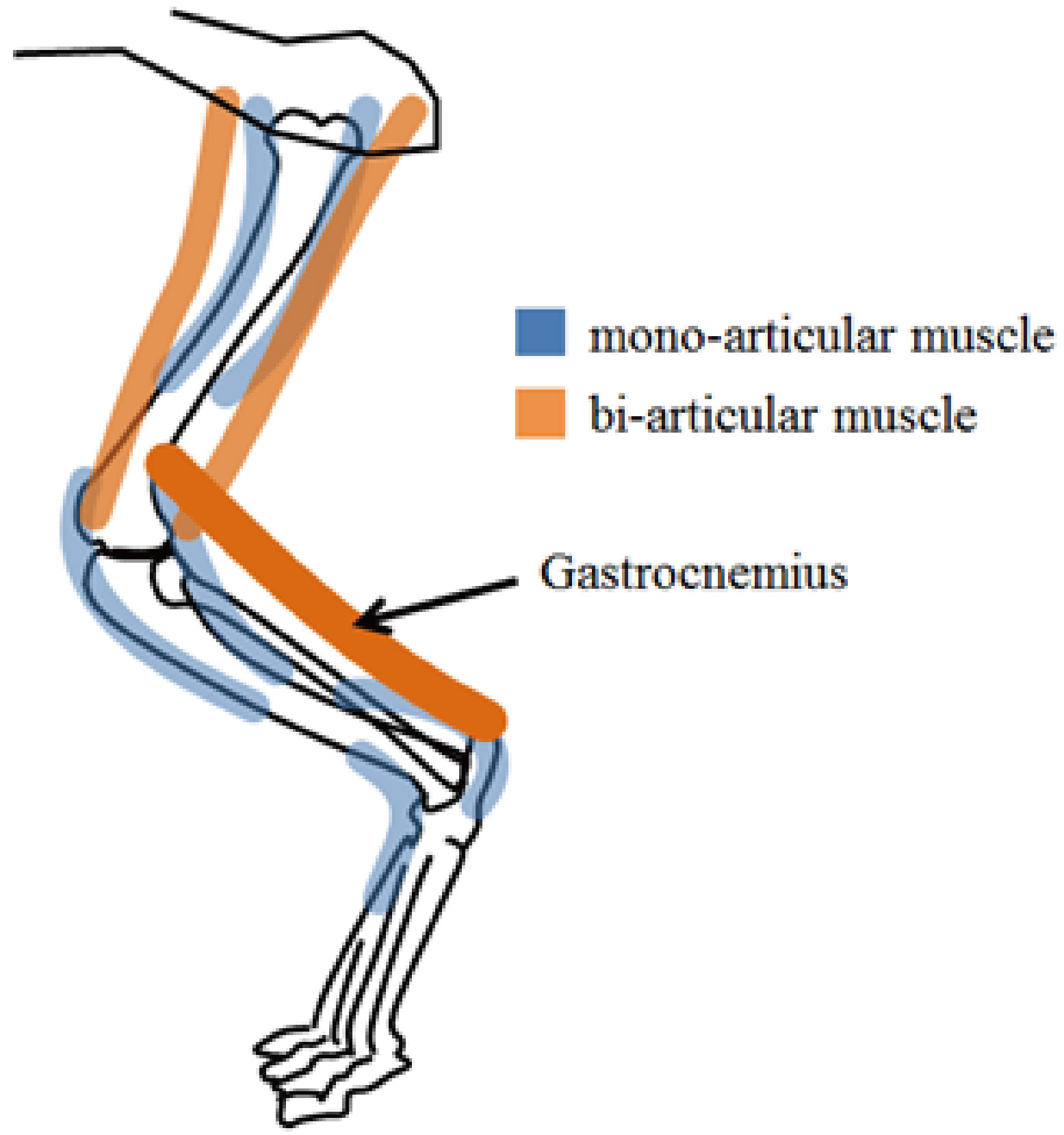
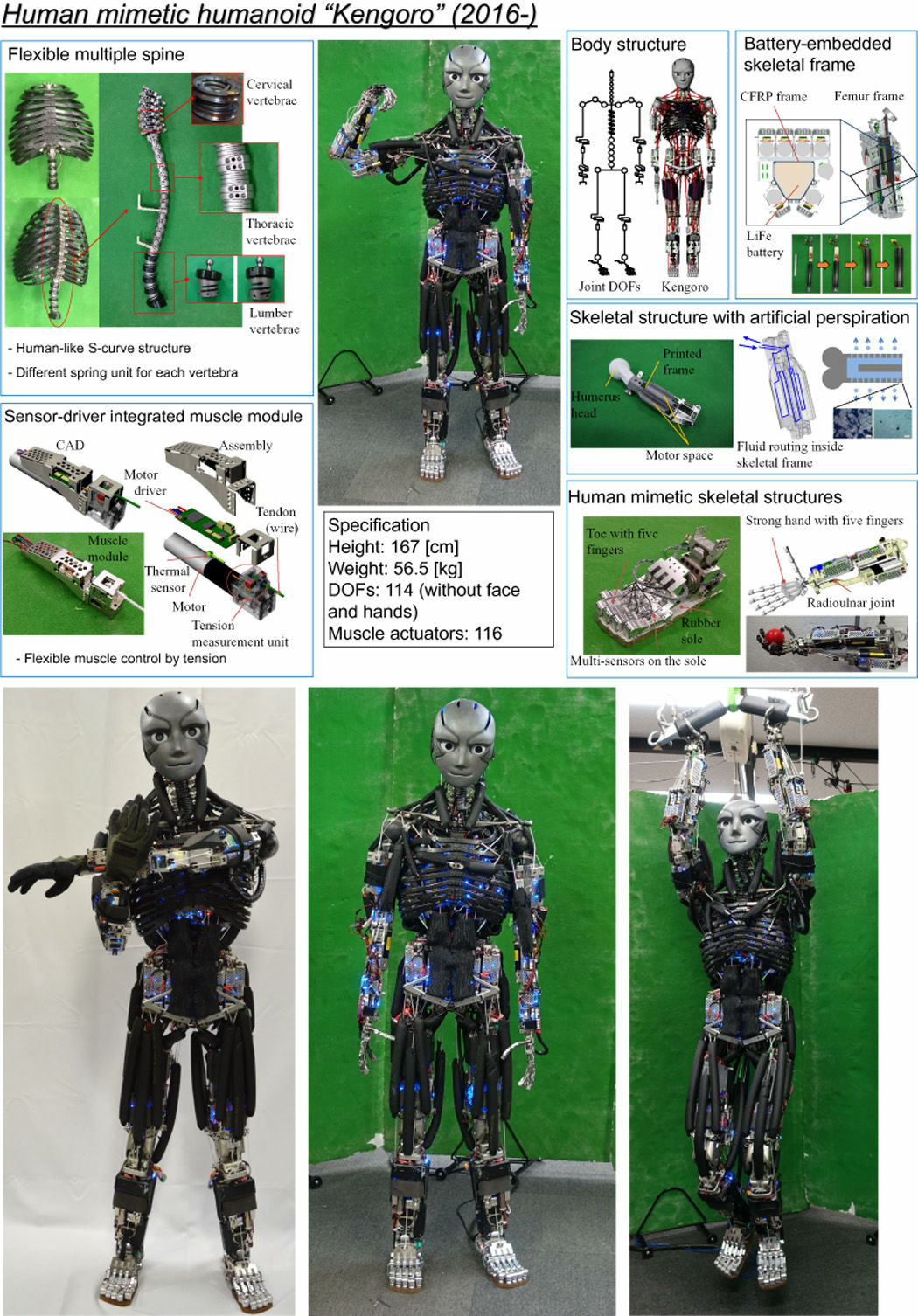
ロボットハンドの制御に関する研究Part II ロボット用アクチュエータ(駆動)機構の開発 (1)腱駆動,(2)空気圧人工筋,(3)丸ベルト捩り機構 アーム搭載型の全方向自律移動ロボットの開発 筋骨格を模した多関節ロボットフィンガと筋電制御.

三等兵の別室 11年07月

ロボットの関節構造
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
ロボットの種類 構造って やさしいwebセミナー
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
ロボットとは ロボット 製品 ソリューション 安川電機

ロボットのシステム構成について 産業用ロボットマイスター
全長10mの超長尺多関節ロボットアームで水平方向10kgの保持に成功 ロボット開発ニュース Monoist
生物模倣4脚ロボットの研究開発 電気通信大学 明研究室

ロボットアームの姿勢保持構造
Q Tbn And9gcrj C4kynujkymqhiw4wer9dhpaikeonsh3bdne Us Usqp Cau

06 号 ロボットの関節構造 Astamuse
ロボットとは ロボット 製品 ソリューション 安川電機
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
Honda Honda Robotics 高所調査用ロボット

ロボットの関節のデザインイラスト 腕の構造の種類をご紹介 お絵かき図鑑

多関節ロボット

ロボットの関節のデザインイラスト 腕の構造の種類をご紹介 お絵かき図鑑 ロボット スケッチ イラスト キャラクターデザイン

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

ロボット関節構造

回転駆動装置 ロボットの関節構造及びロボットアーム

6軸 垂直多関節型 ロボット N6シリーズ 製品情報 産業用ロボット エプソン

人間とほぼ同じ構造のロボットアーム Gigazine
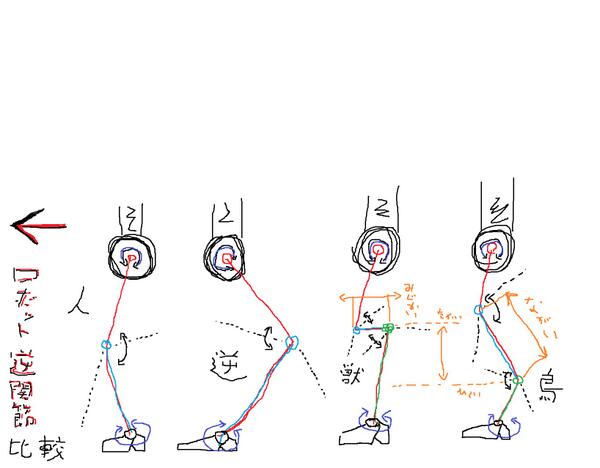
狐 En Twitter ロボットの 逆関節 を言われる構造 を自分なりに分類してみた 逆型は身近な物ですとマクロスのガウォーク等に見られますね ちなみに私は獣型が好きです 鳥型と獣型の違いはロボットによってすごく曖昧なので適当で良いです メカ 逆関節 Http T

Biped Robot In Mel
特開18 知財ポータル Ip Force
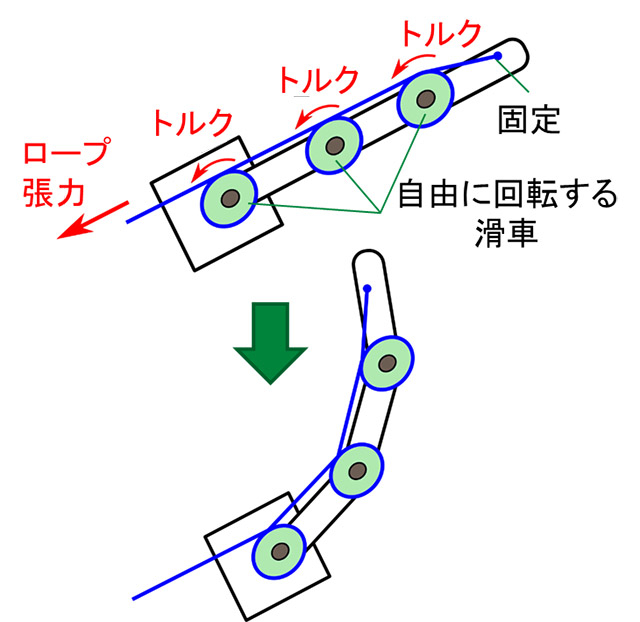
世界最長10 Mの超長尺多関節ロボットアームで 水平方向10 Kg保持を達成 廃炉調査への利用可能性を19年度中に検討予定 東工大ニュース 東京工業大学
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
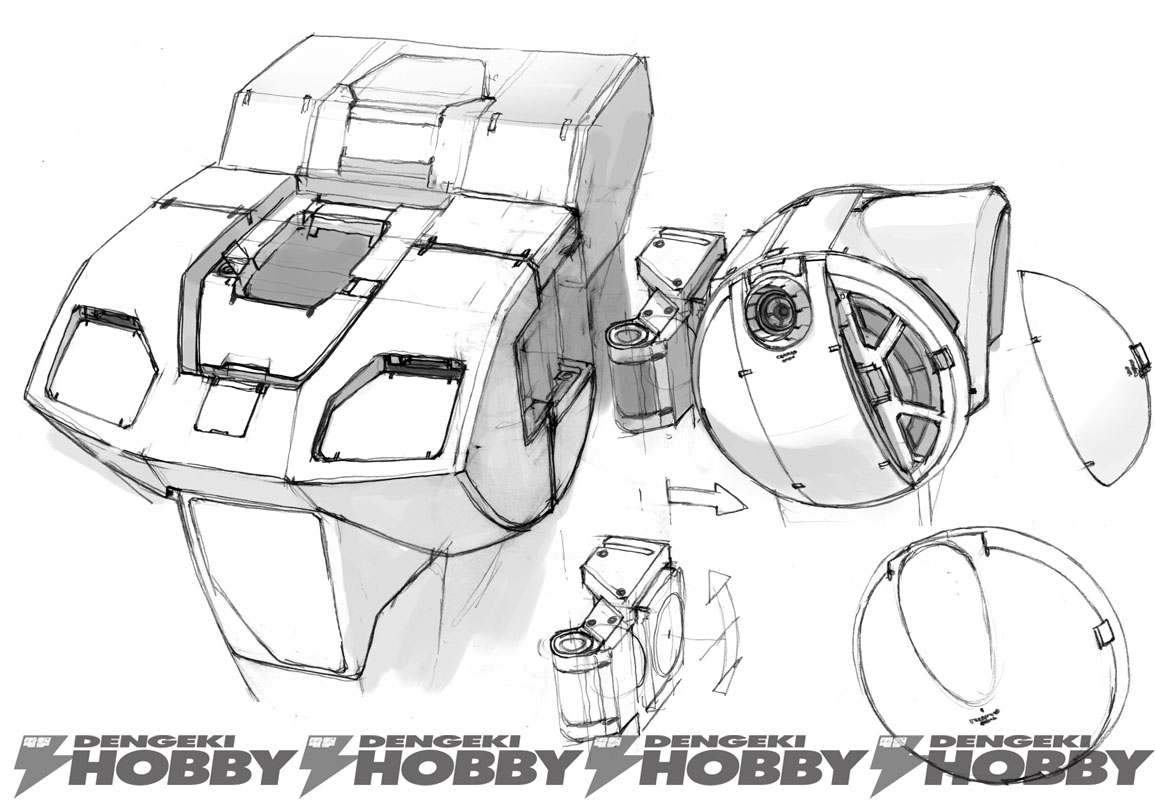
Rvの腕部 胴体の機構及び内部構造についての考察 連載 電撃ロボラボ Plus Vol 2 電撃ホビーウェブ

関節構造体及びロボットアーム

ナブテスコ 株 産業用ロボット用精密減速機で世界ナンバーワンをひた走る 日本機械学会誌

ロボットの関節構造 ロボットフィンガー及びロボットハンド
水平多関節ロボットとは 特徴やメリット デメリット 工場3選 ロボットsierの日本サポートシステム

小型多関節ロボット Smartwing

産業用ロボットにはどんな種類がある 主な6タイプの特徴を解説 Xyz 川崎重工業株式会社

ロボットの軸構造とそれを備えた多関節ロボット

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

13 号 ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット Astamuse
千葉工業大学 未来ロボティクス学科 ロボット機構学
完全ベルトレス構造が高速 高剛性 高精度を実現 スカラロボットの特長を極限まで追求

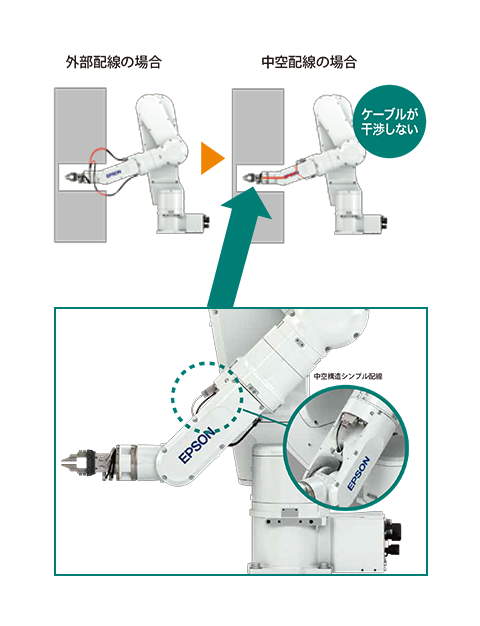
1995 32号 産業用ロボットのケーブル処理装置 Astamuse
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

スカラ ロボットの発想

前回は腕部の関節可動からフレーム 推進剤タンク等の内部構造 そこから胸部ならびに胴体構造へと話が及んだ機構検証 今回はさらに腕部の立体機構試作が進められたところで それを基により考証を深めていきました ロボットアート アニメ ロボット 兵器コンセプト
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

カスタムロボットアーム製作用 Hebi スマートアクチュエータ 日本バイナリー株式会社
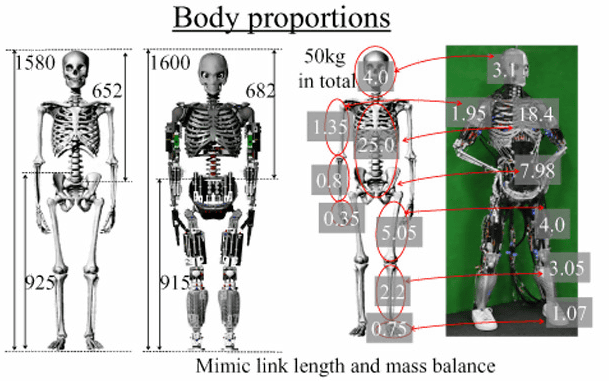
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine
垂直多関節ロボット新シリーズ 新型コントローラー Rc9 と組み合わせ Faニュース Monoist

今さら聞けない 垂直多関節ロボットの特徴と構造について解説 リンクウィズ株式会社 ソフトウェアによって ロボット 自体が考え 動きを補正する という新しい価値を提供します
剛体リンクを持つ着用型ロボット関節機構の設計の研究 福岡工業大学 情報工学部 情報システム工学科 森園研究室

知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
ロボットの種類 構造って やさしいwebセミナー

人型ロボットの頭部支持構造

05 号 ロボット関節構造 Astamuse

4万円の水平多関節ロボットアーム アカデミック スカラロボット にトキメキが止まらない 週刊アスキー

16 号 ロボット関節構造及びロボット装置 Astamuse

水平多関節ロボット Wikipedia

ロボットの関節構造 ロボットフィンガ及びロボットハンド
ロボットとは ロボット 製品 ソリューション 安川電機

三等兵の別室 人型ロボットに最低限必要な関節 下半身編

多関節ロボットアームの関節部構造 及びミニエンバイロメント装置
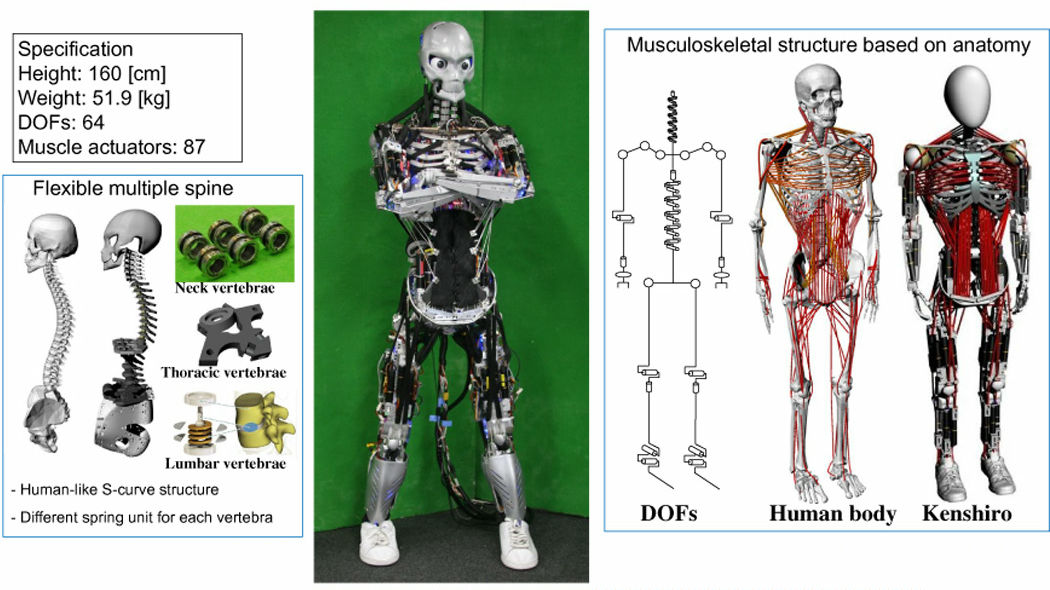
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine

01 号 水平多関節型産業用ロボット及びその制御方法 Astamuse

09 号 産業用ロボットの関節構造 Astamuse
ロボットの種類 構造って やさしいwebセミナー
多関節ロボットを部分的に利用する事の構造的メリット

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
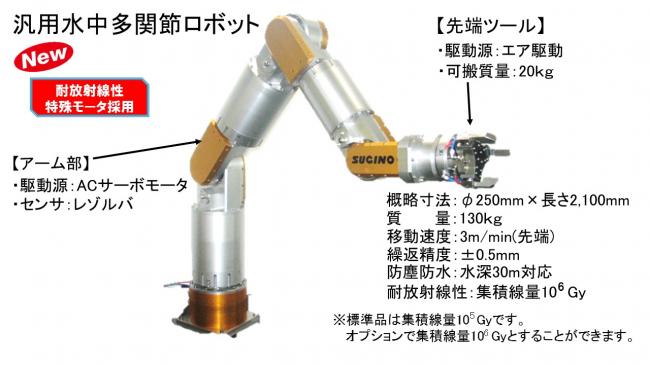
水中多関節ロボット スギノマシン公式ウェブサイト

15 号 産業用ロボットの関節構造 Astamuse
1 ロボットアーム
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
小型スカラロボット Yk Xg スカラロボット 産業用ロボット ヤマハ発動機
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine
6軸 垂直多関節型 ロボット N6シリーズ 製品情報 産業用ロボット エプソン

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

Nec News Release 95 08 30 02

13 号 ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット Astamuse
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf
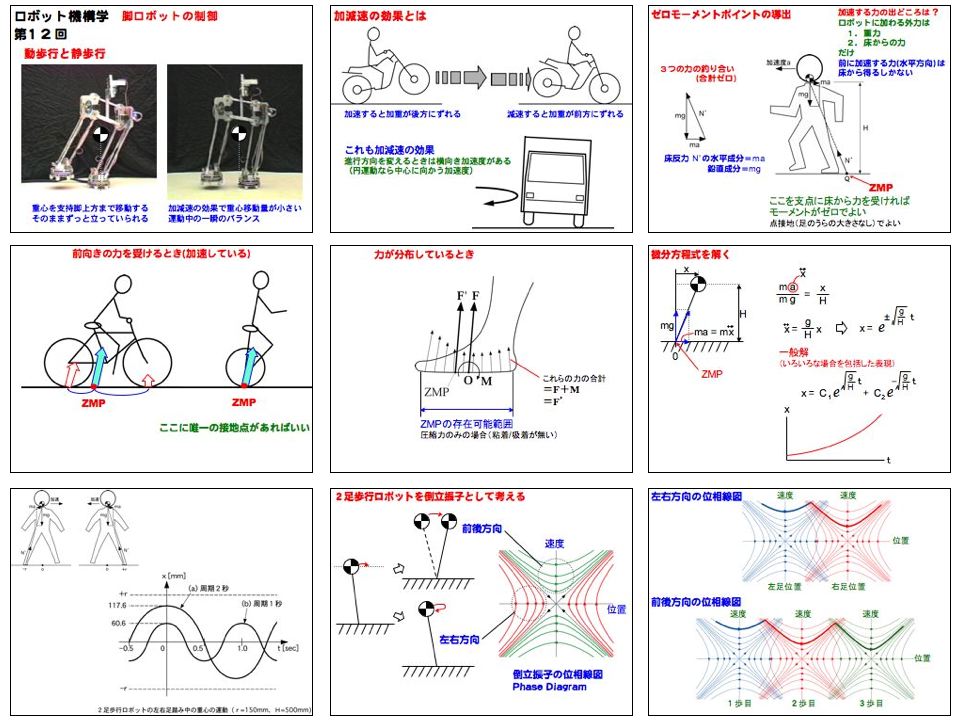
千葉工業大学 未来ロボティクス学科 ロボット機構学
Q Tbn And9gcscacdae8df2q5kilgjnm36x1x09xbpzdds7aavdmts 1u12ejj Usqp Cau

スカラ型ロボットの駆動部構造
図解 垂直多関節ロボットとは 構造とメリットを解説 ロボットsierの日本サポートシステム
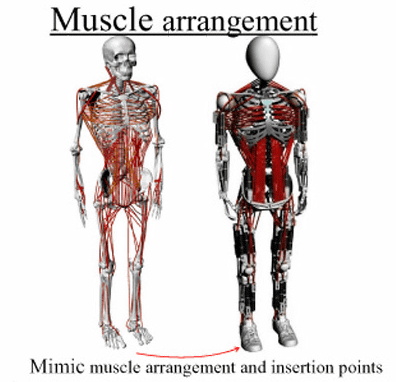
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine

産業用ロボットにはどんな種類がある 主な6タイプの特徴を解説 Xyz 川崎重工業株式会社
Hero X 半分 青い に登場した ピアノを弾くロボットハンドの生みの親とは The Innovator 前編
人の手をヒントにした新構造ロボットハンド Nedoなどが3種を試作 紙でも作れる Itmedia News

なぜ人気 垂直多関節ロボットのメリットと用途を構造から解説 ロボット導入 Comブログ ロボット導入 Com

垂直多関節7軸ロボット Yaシリーズ 垂直多関節ロボット 産業用ロボット ヤマハ発動機
水平多関節ロボット スカラロボット が活きる現場 安長電機株式会社
図解 垂直多関節ロボットとは 構造とメリットを解説 ロボットsierの日本サポートシステム
Q Tbn And9gctzdkifhudcadx1iq3e80cl8bgvojx3lknn Yyhyjtwedwzdgw2 Usqp Cau

16 号 関節式ロボットアームの手首構造 Astamuse

いまさら聞けない産業用ロボット入門 前編 産業用機器 基礎解説 2 4 ページ Monoist
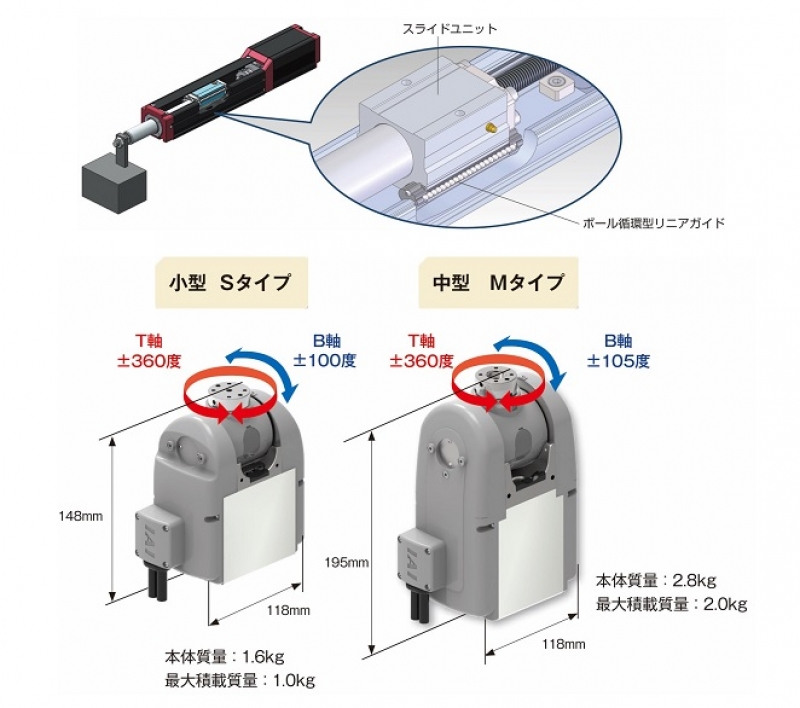
注目製品pickup Vol 14 リーズナブルな単軸 直交でここまでできる 前編 アイエイアイ ロボシリンダー 産業用ロボット に特化したウェブマガジン
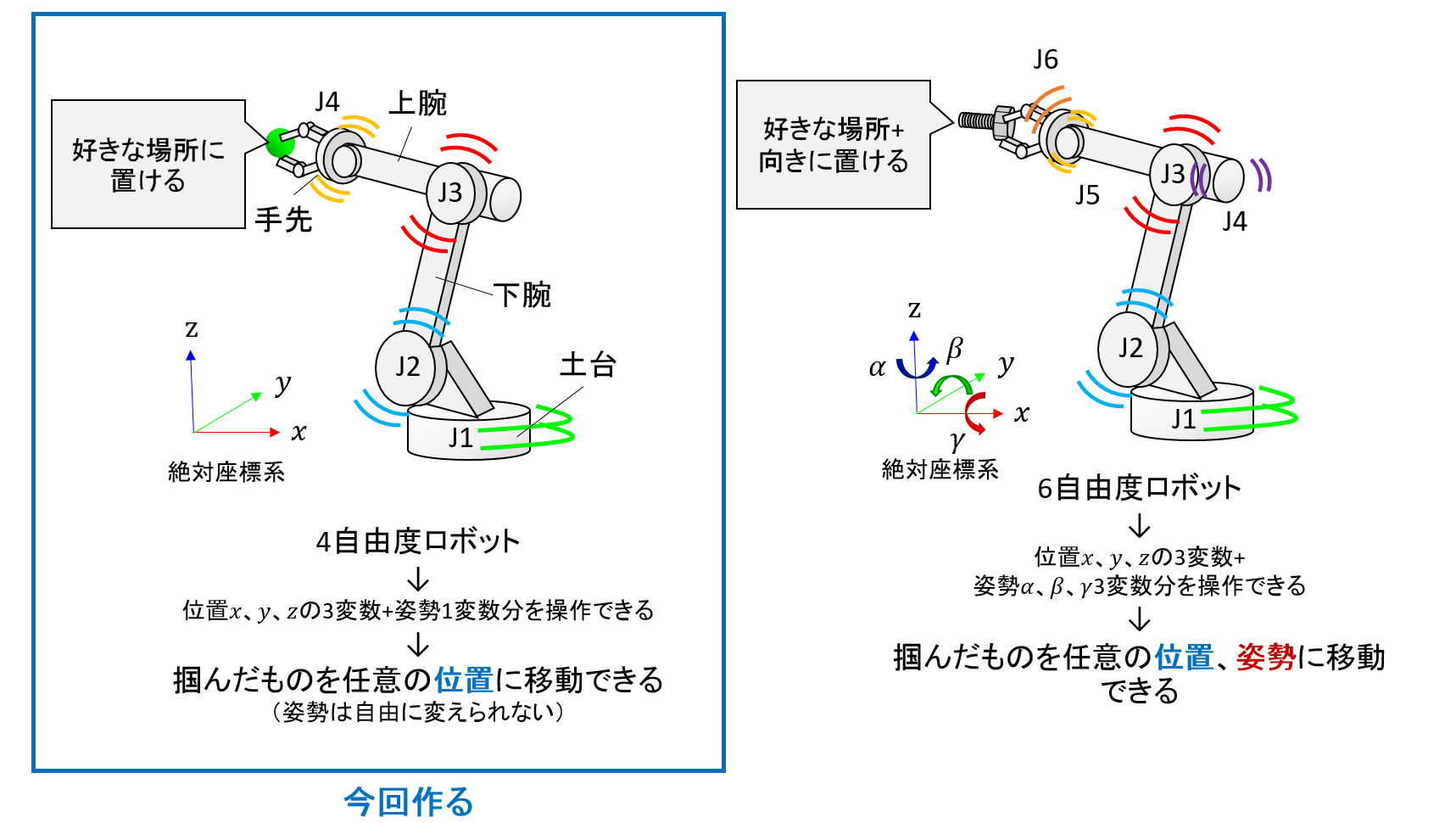
順運動学を使ったロボット描画 製作するロボットの構造説明 メカトロdiy工業

07 号 水平多関節ロボット Astamuse
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf



